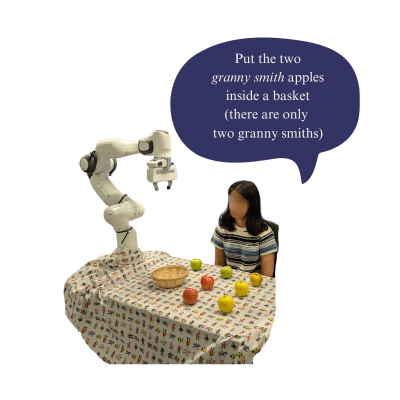
FEATURED PUBLICATIONS SECURE: Semantics-aware embodied conversation under unawareness for lifelong robot learning Rimvydas Rubavicius, Peter David Fagan, Alex Lascarides, Subramanian Ramamoorthy School of Informatics, University of Edinburgh, UK Published in the...
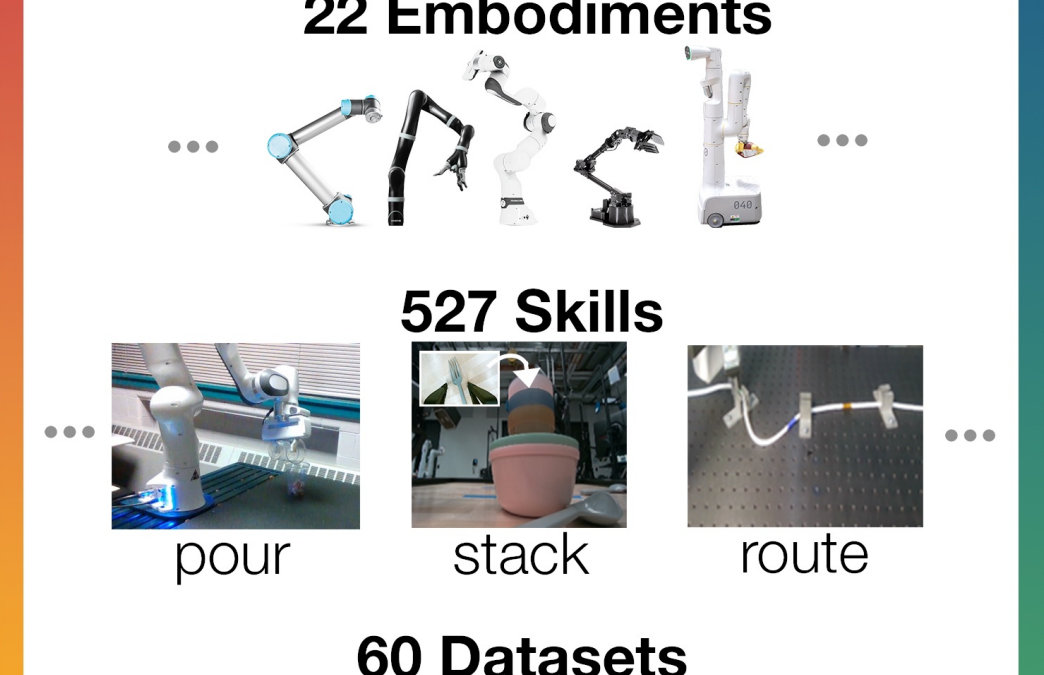
FEATURED PUBLICATIONS Open-X Embodiment Collaboration, Open X-Embodiment: Robotic learning datasets and RT-X models Open X-Embodiment Collaboration (see full author list in the paper) Published in IEEE International Conference on Robotics and Automation, ICRA 2024...
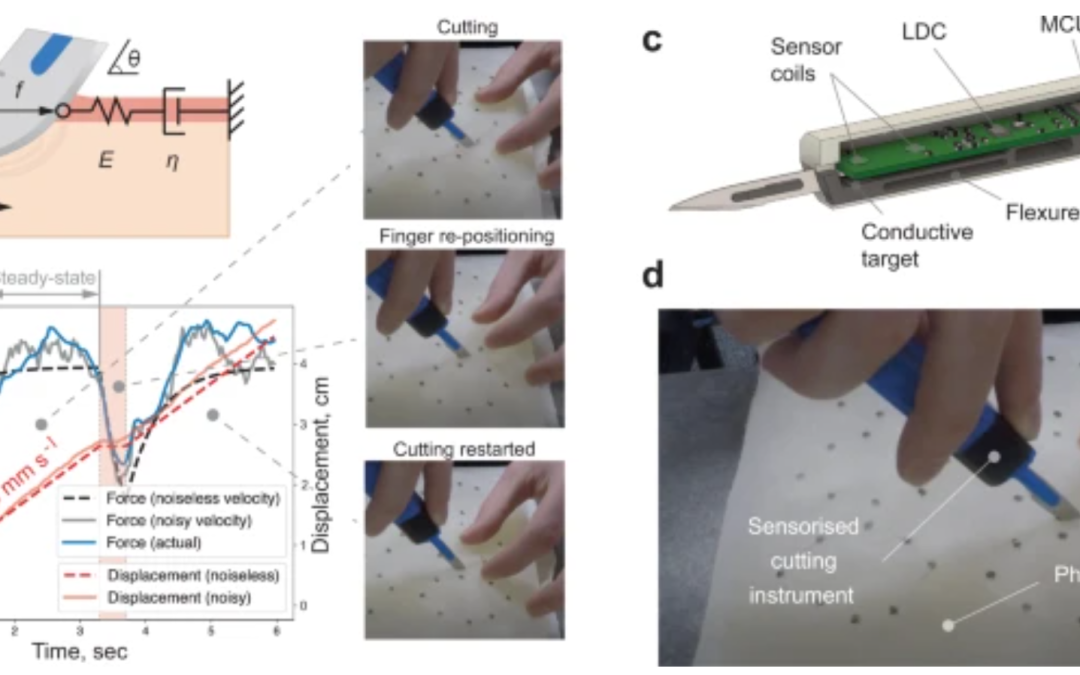
FEATURED PUBLICATIONS A generative force model for surgical skill quantification using sensorised instruments Artūras Straižys¹, Michael Burke¹ ², Paul M. Brennan¹, Subramanian Ramamoorthy¹ ³ ¹ – University of Edinburgh, Edinburgh, UK² – Monash University, Clayton,...
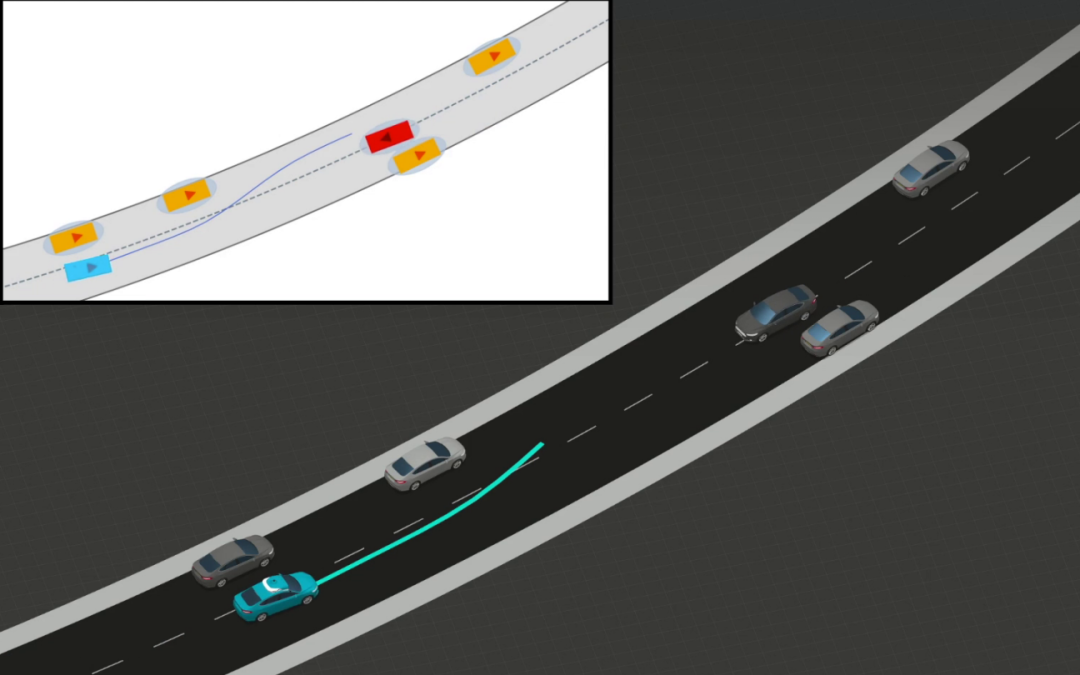
FEATURED PUBLICATIONS A two-stage optimization-based motion planner for safe urban driving Francisco Eiras¹ ², Majd Hawasly¹, Stefano V. Albrecht¹ ³, Subramanian Ramamoorthy¹ ³ ¹ – Five AI Ltd., UK² – School of Informatics, University of Edinburgh, UK³ – Department of...
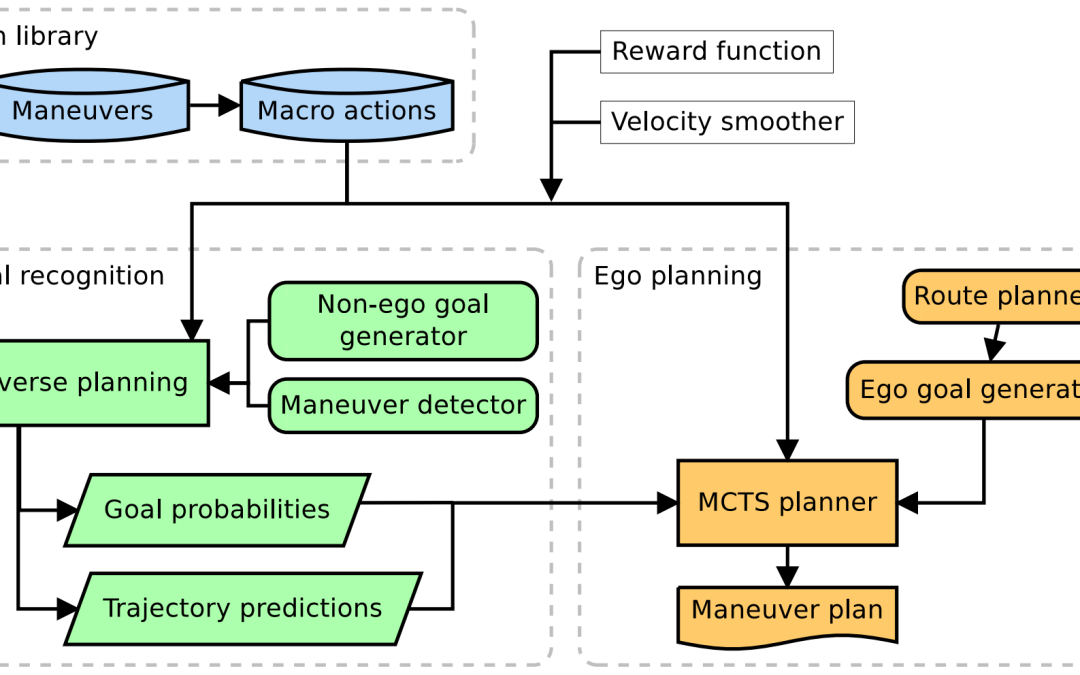
FEATURED PUBLICATIONS Interpretable goal-based prediction and planning for autonomous driving Stefano V. Albrecht¹ ², Cillian Brewitt¹ ², John Wilhelm¹ ², Balint Gyevnar¹ ², Francisco Eiras¹ ³, Mihai Dobre¹, Subramanian Ramamoorthy¹ ² ¹ – Five AI Ltd., UK²...